








AI车船自动驾驶仪
本系统基于NVIDIA® Jetson AGX Orin/Xavier高性能AI计算平台,结合IV飞控系统的高可靠性运动控制与高亮工业显示屏的人机交互能力,打造一套适用于水上无人驾驶场景的智能导航控制系统。具备以下特点:
分布式智能架构:Jetson 负责感知与决策,IV飞控负责运动控制与执行,显示屏提供实时监控与交互;
多传感器融合:支持雷达、声呐、视觉、GNSS、IMU等传感器输入,实现全场景环境感知;
高精度定位与构图:结合视觉SLAM与GNSS/IMU融合定位,支持实时建图与路径规划;
自主避障与任务规划:具备动态障碍物识别与智能绕障能力,支持多任务自动调度;
强环境适应性:宽温设计、防振抗干扰,满足海事、河道、湖泊等多种复杂水域作业需求;
开放开发平台:支持JetPack、ROS、Python等开发环境,便于二次开发与功能扩展。
本系统基于NVIDIA® Jetson AGX Orin/Xavier高性能AI计算平台,结合IV飞控系统的高可靠性运动控制与高亮工业显示屏的人机交互能力,打造一套适用于水上无人驾驶场景的智能导航控制系统。具备以下特点:
分布式智能架构:Jetson 负责感知与决策,IV飞控负责运动控制与执行,显示屏提供实时监控与交互;
多传感器融合:支持雷达、声呐、视觉、GNSS、IMU等传感器输入,实现全场景环境感知;
高精度定位与构图:结合视觉SLAM与GNSS/IMU融合定位,支持实时建图与路径规划;
自主避障与任务规划:具备动态障碍物识别与智能绕障能力,支持多任务自动调度;
强环境适应性:宽温设计、防振抗干扰,满足海事、河道、湖泊等多种复杂水域作业需求;
开放开发平台:支持JetPack、ROS、Python等开发环境,便于二次开发与功能扩展。
| 类别 | 项目 | 规格描述 |
|---|---|---|
| 计算单元 | 处理器 | NVIDIA Jetson AGX Orin / Xavier(可选) |
| AI 算力 | 32~275 TOPS | |
| GPU | 512~2048 Core NVIDIA Ampere/Volta + Tensor Cores | |
| CPU | 8~12 Core Arm Cortex-A78AE / Carmel | |
| 内存 | 32GB/64GB LPDDR5/LPDDR4x | |
| 存储 | 32GB/64GB eMMC 5.1,支持 TF/M.2 扩展 | |
| 运动控制 | 主处理器 | STM32H743 (480MHz, 2MB Flash, 1MB RAM) |
| 协处理器 | STM32F103 | |
| 传感器 | BMI055/CM-42688-P (IMU),iST8310 (磁力计) | |
| 控制接口 | CAN × 2,PWM × 10,UART × 3,USB Type-C | |
| 显示单元 | 屏幕 | 17.3" FHD TFT LCD,1920×1080 |
| 触摸屏 | 支持 | |
| 亮度 | 500 nits | |
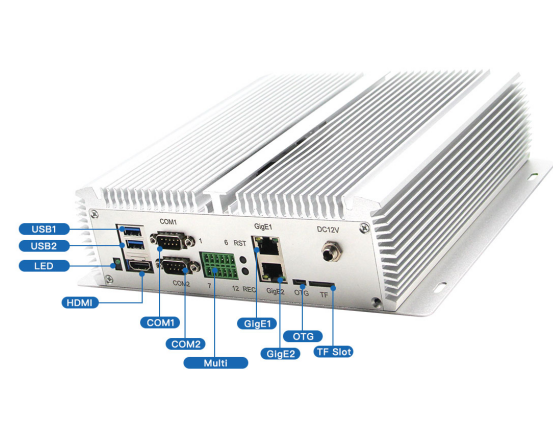
| 接口 | 网络 | 双千兆以太网 |
| 串口 | RS232 × 2,UART × 3 | |
| USB | USB 3.0 Type-A × 2,Micro USB (OTG) × 1,Type-C × 1 | |
| 视频输出 | HDMI 2.0 | |
| 扩展接口 | GPIO × 4,CAN × 2,TF卡槽,Micro SD | |
| 电源与环境 | 输入电压 | DC 12V(主控) + 5V(飞控) |
| 工作温度 | -20°C ~ +55°C(主控)/ -30°C ~ +80°C(飞控) | |
| 防护等级 | 工业级防护设计,满足 GJB150/151 振动与电磁兼容 | |
| 尺寸 | 主控:238×222×67mm;飞控:47×83×12mm;显示屏:455×449×90mm | |
| 重量 | 主控:2.59kg;显示屏:9kg |

Copyright © 2003-2021,
www.bjopc.com.cn,All rights reserved
版权所有 © 北京奥普客交电销售中心 未经许可 严禁复制 京ICP备2021012472号-1
