1.型号命名: DM9065 | 19.驱动:FOC内置驱动 |
2.型号版本: DM9065(2025V1.0) | 20.控制模式:位置模式、速度模式 |
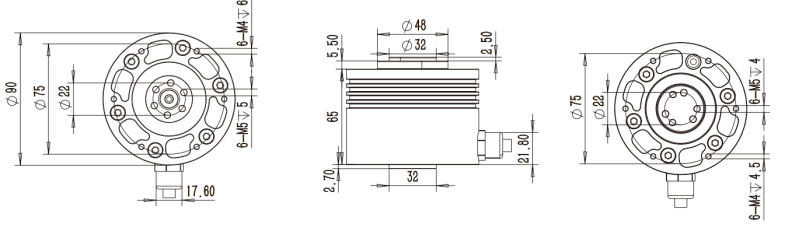
3.型号描述:运转扭矩约25N·m的水下圆柱伺服关节 | 21.波特率: |
4.应用场景:水下机械手臂、水下云台、机器鱼关节致动器、 | RS485波特率:9600、19200、57600、115200、230400、 |
水下镜头清洁致动器、水下阀门执行器 | 406800、1M、2M |
5.密封方式:免维护全密封 | CAN 波特率:100K、125K、250K、500K、1M |
6.密封结构:旋转动密封结构 | 22.控制频率:RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
8.额定电压:48VDC | 23.参数反馈:位置、速度、电压、电流、温度 |
9.额定电流:4.8A | 24.保护功能:堵转、过压、过流、过热、过载 |
10.额定运转扭矩:25Nm | 25.技术资料:提供通讯协议、3D 外观图纸 |
11.工作电压:24-48VDC | 26.主轴材质:316L不锈钢 |
12.电机类型:无刷电机 | 27.齿轮材质:齿轮钢 |
13.角度范围:360° | 28.防水壳体材质:316L不锈钢 |
14.额定转速:24V 40RPM 48V 70RPM | 29.线缆外皮材质: TPU (聚氨酯) |
15.传感器类型:磁编码 | 30.线缆规格:外径/长度/内芯:可定制。可选择水密接插件 |
16.最小可控角度:±0.1° | 31.耐压深度:300m |
17.通讯接口:485/can | 32.重量:空中重量1700g 水中重量1300g |
18.减速比:36:1 | 33.温度:储存温度:0~40℃工作温度:0~35℃ |